Whitney Dancing Stand Development, Part 1
So Cory has a bigass show coming up at the Whitney this summer, and I’ve got SEVENTEEN!! dancing stands to build. They’re different from the last batch in that they have to run synchronously. The idea is to use a PID control loop and sync them via RF. They run on steppers, mostly because it was easy to find steppers that were torquey enough for the application and still fit under the dancing stand easily. The MCU is an Atmel, the RF link is by LINX, and the stepper driver is a TI DRV8xxx part.
Here’s the protos:
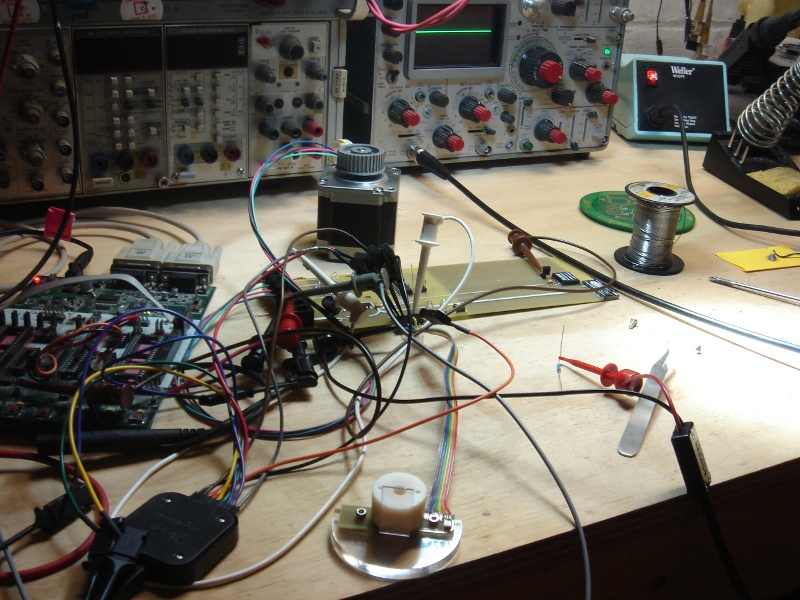
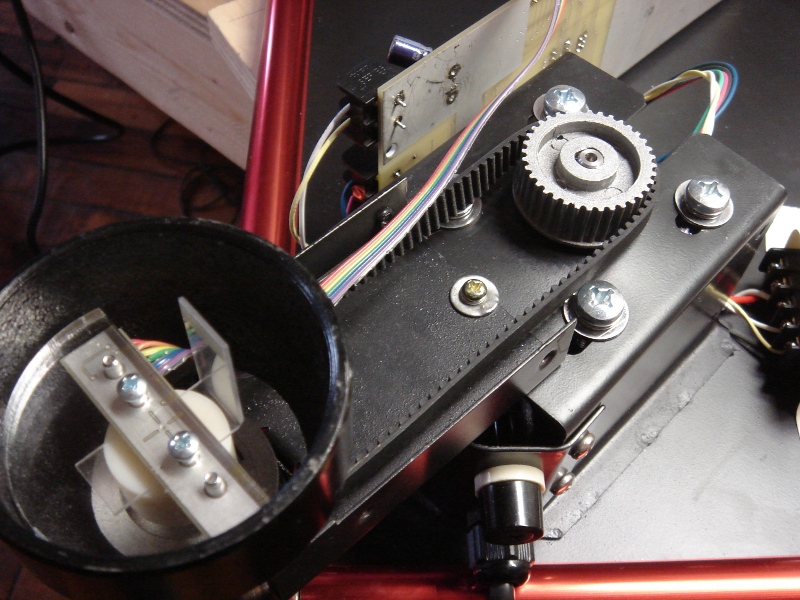
The system has a lot of slop, and I decided to do positional feedback using an absolute position sensing magnetic rotary encoder. This one is by Austria Microsystems. The specs on these are INCREDIBLE, but mounting them takes serious care to get that accuracy. I made a bunch of jigs, you can see this one all strung up under the stand’s driven leg. We’ll see how well they work…
Oh, yeah. And we made more bowling controllers. Or mostly my assistant Daniel did. These guys are really getting pretty cookie-cutter:

I feel pretty good about the protos of those stands, but my crystal ball predicts something will be screwy. We’ll see.
Tags: Art Shiz, Cory Arcangel, dancing stands, encoders, Hardware, motor control, whitney