Whitney Dancing Stand Development, Part 3
Tuesday, April 26th, 2011What a marathon.
So, in the last week or so we solidified the designs and there is a horde of 20-somethings with cool haircuts in my apartment running power drills.
CHANGES:
— Nixed the PID loop in favor of a stepper specific approach. We now calculate error in steps once a turn and adjust for it.
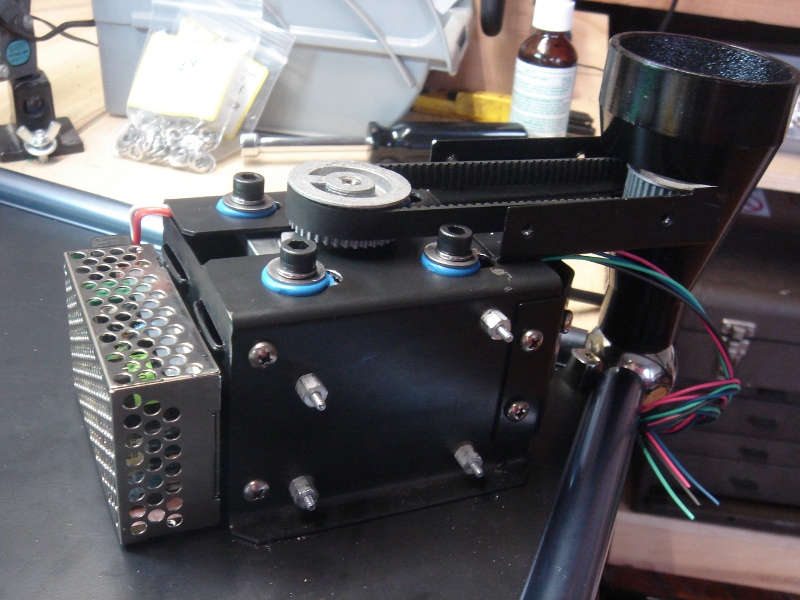
— Added vibration dampening grommets to the motor mounts to keep noise down.
— Added covers for the AC lines (so you can’t climb under the new media art and lick mains current)
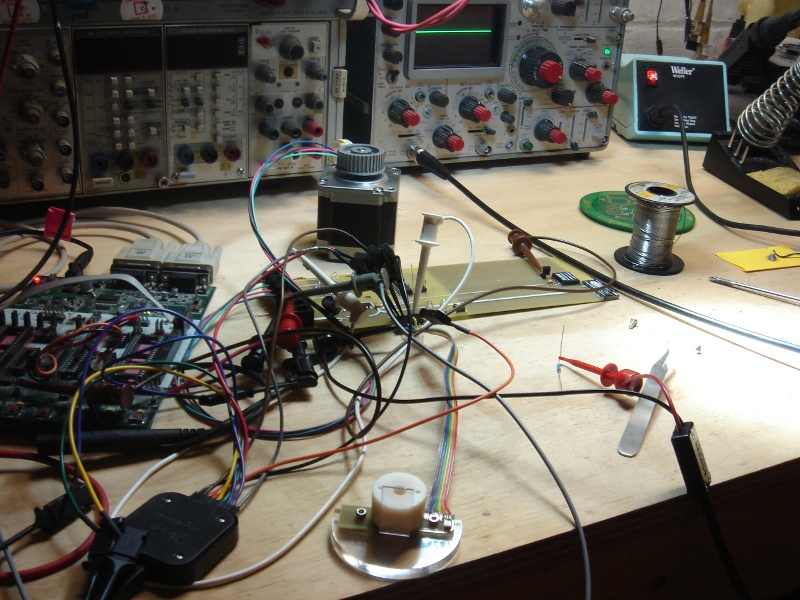
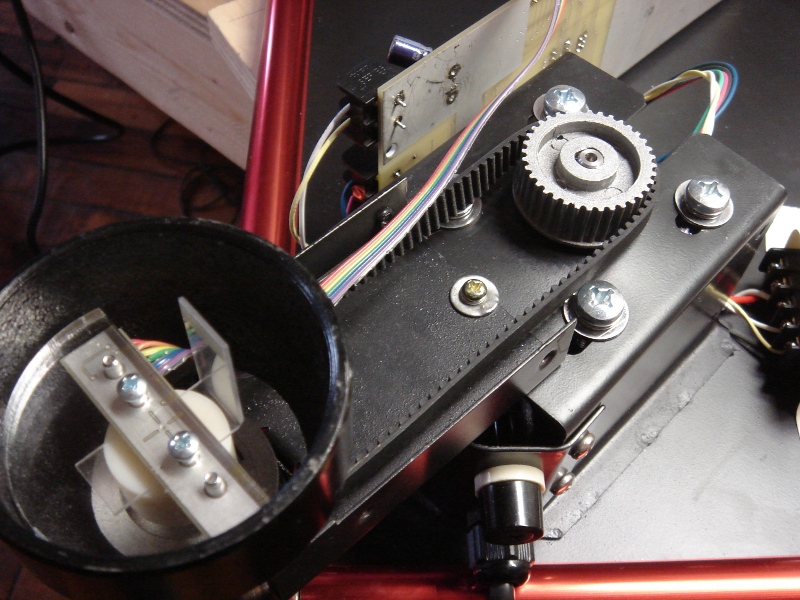
Here’s one underway. That vented thing is an enclosed switcher to run the stepper and electronics.
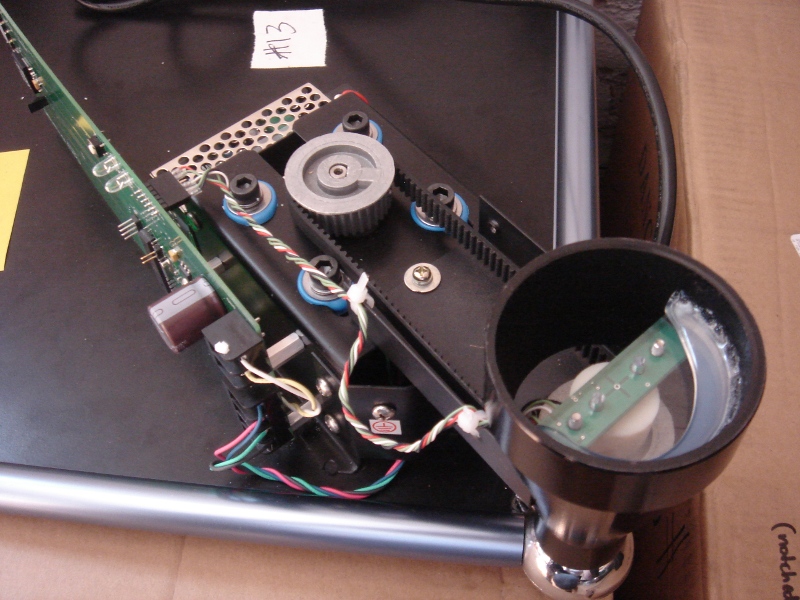
And here’s good old Lucky Number 13, all set to go:
Lastly, before kicking these things out the door I made some videos of them correcting for errors. By which I mean “beating them up”. If you get a chance to do this at the Whitney and the guard isn’t looking, you should do it. More videos on the youtube channel.
Beer o’clock,
TB