What a marathon.
So, in the last week or so we solidified the designs and there is a horde of 20-somethings with cool haircuts in my apartment running power drills.
CHANGES:
— Nixed the PID loop in favor of a stepper specific approach. We now calculate error in steps once a turn and adjust for it.
— Added vibration dampening grommets to the motor mounts to keep noise down.
— Added covers for the AC lines (so you can’t climb under the new media art and lick mains current)
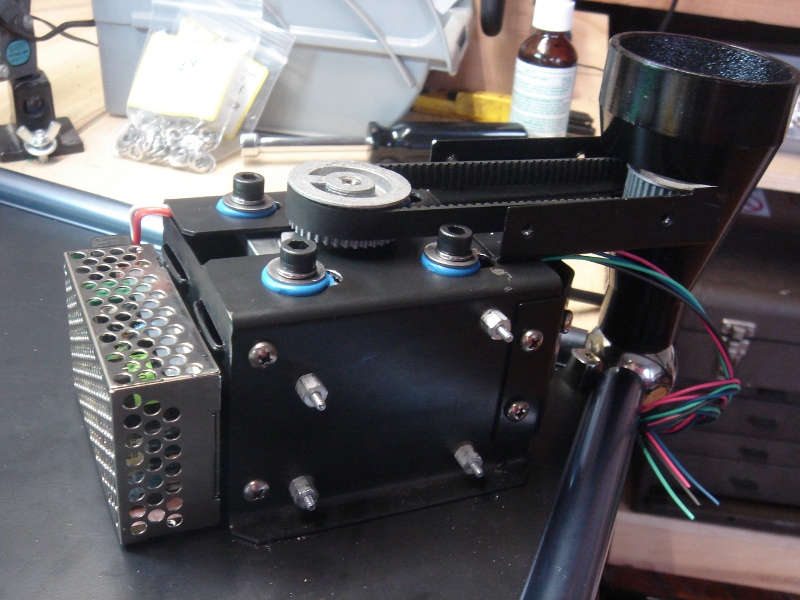
Here’s one underway. That vented thing is an enclosed switcher to run the stepper and electronics.
And here’s good old Lucky Number 13, all set to go:
Lastly, before kicking these things out the door I made some videos of them correcting for errors. By which I mean “beating them up”. If you get a chance to do this at the Whitney and the guard isn’t looking, you should do it. More videos on the youtube channel.
Sorry for the short posts. These are long days.
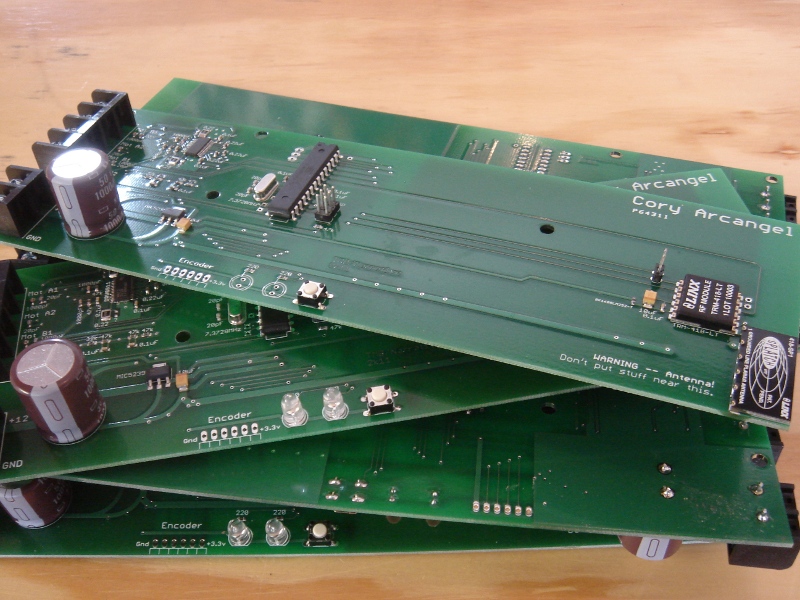
The real dancing stand controller boards are here!
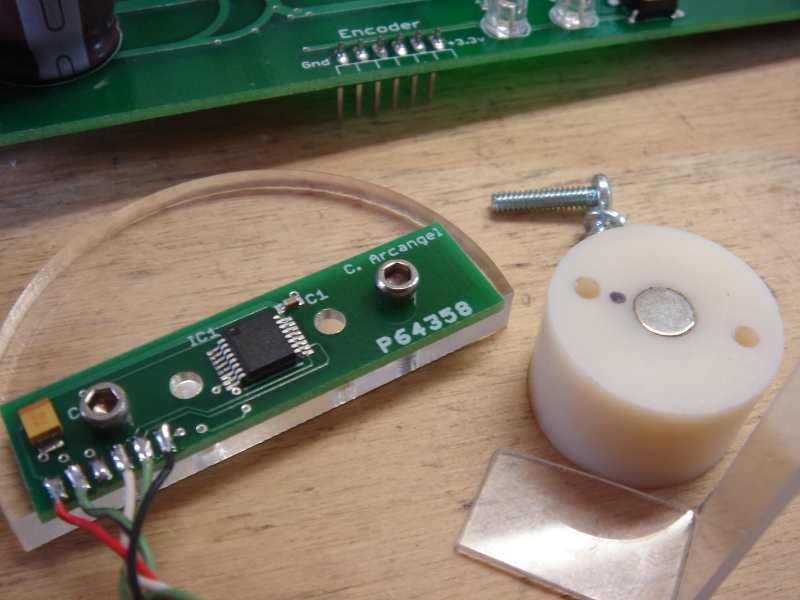
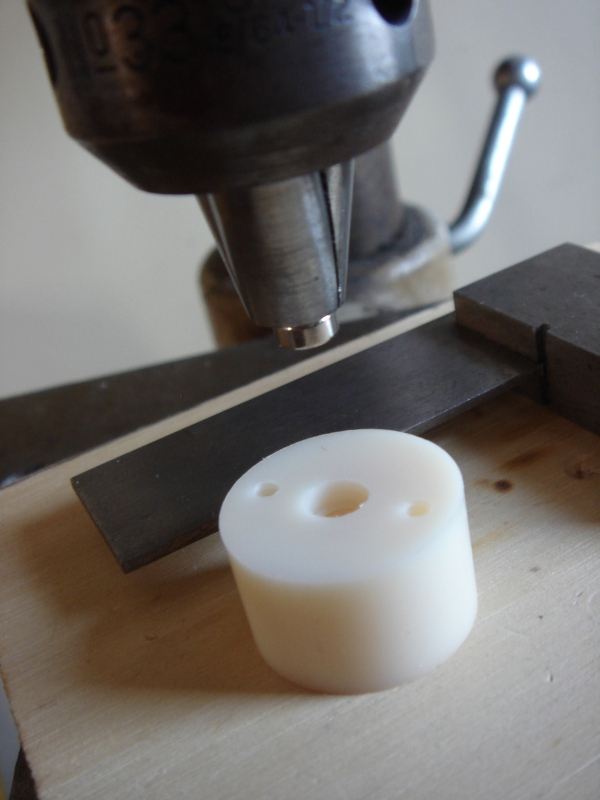
The real magnetic position sensing encoders, too:
The other side of those encoders is a magnet (read the datasheet if you’re curious — these parts are expensive and awesome and totally worth it), and that magnet has to be centered very precisely over the IC. Any eccentricity or slop or variation in Z height will make for bad accuracy. You wouldn’t guess from the datasheet but these parts are actually pretty forgiving. Nonetheless, I had a buddy of mine (Joe, over at BreadBox Studio) turn me some ABS magnet holders which keep the magnet aligned with the shaft of the stand. They also space the magnet off the shaft itself (the shaft is steel and screws with the magnetic field as the encoder wants to see it) and provide some registration holes. The magnets are press fit into the ABS turnings. Like so:
Thanks, Joe! Now I gotta crank out 17 and make sure they all do what they should. Wish me luck….
So Cory has a bigass show coming up at the Whitney this summer, and I’ve got SEVENTEEN!! dancing stands to build. They’re different from the last batch in that they have to run synchronously. The idea is to use a PID control loop and sync them via RF. They run on steppers, mostly because it was easy to find steppers that were torquey enough for the application and still fit under the dancing stand easily. The MCU is an Atmel, the RF link is by LINX, and the stepper driver is a TI DRV8xxx part.
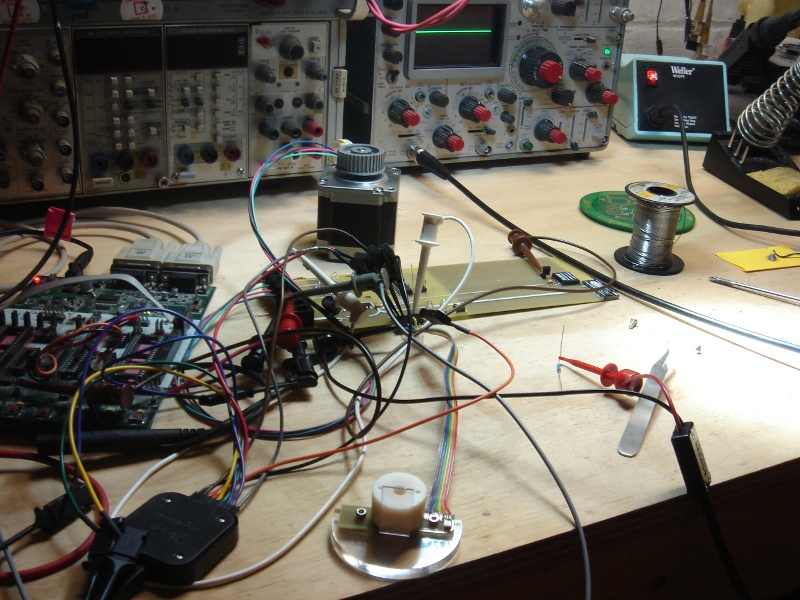
Here’s the protos:
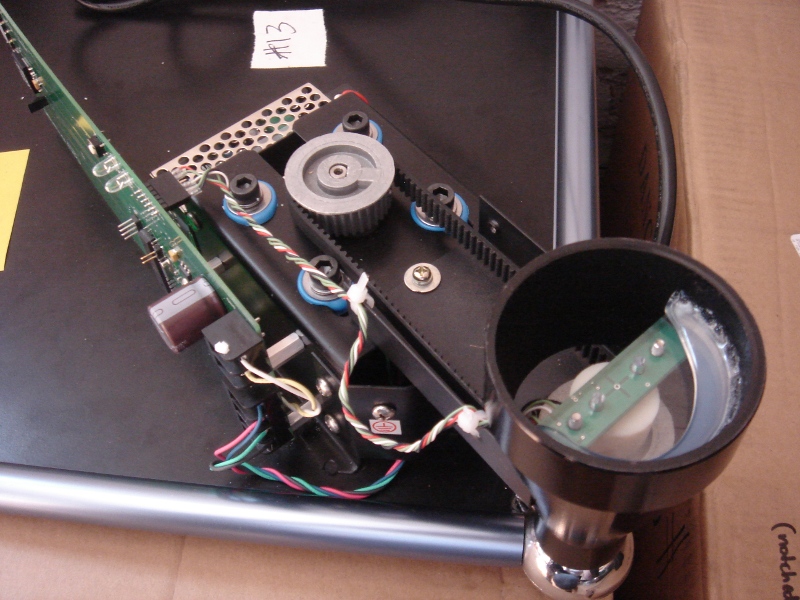
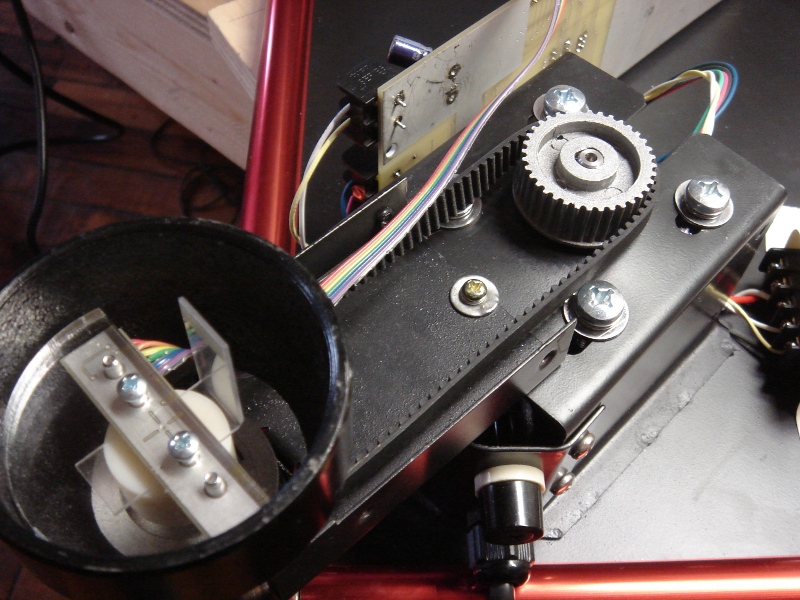
The system has a lot of slop, and I decided to do positional feedback using an absolute position sensing magnetic rotary encoder. This one is by Austria Microsystems. The specs on these are INCREDIBLE, but mounting them takes serious care to get that accuracy. I made a bunch of jigs, you can see this one all strung up under the stand’s driven leg. We’ll see how well they work…
Oh, yeah. And we made more bowling controllers. Or mostly my assistant Daniel did. These guys are really getting pretty cookie-cutter:
I feel pretty good about the protos of those stands, but my crystal ball predicts something will be screwy. We’ll see.
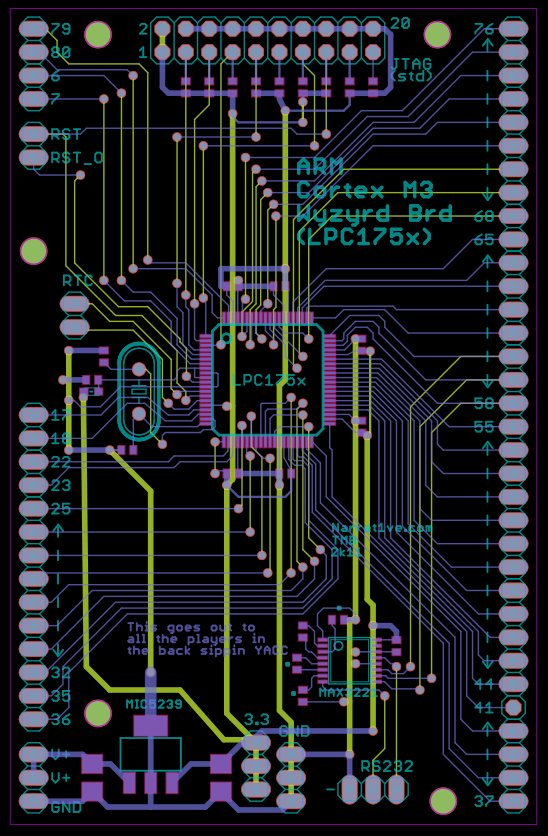
I had a slow week this week and laid out and ordered a “bare metal” PCB for an ARM Cortex M3 — the NXP LPC175x series. I spend too much time messing with 8-bit MCUs. It’s 2011 after all.
I brought up an ARM7TDMI awhile back, and figured it was worth at least trying to stay current. One of these days I’ll populate this guy, and eventually hopefully even program it.
This is a supermodel wearing my White Lion tee shirt. Really. I would rather it was my El Camino, but I’ll take it.
This doesn’t have anything to do with electronics. But still.