WTPA2 Asssembled!
It’s built!
All the footprints work, nothing smacks anything else. Physically no failures. And it’s pretty!
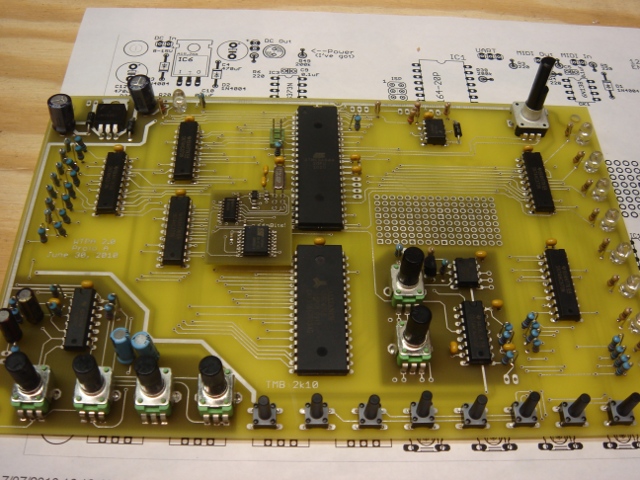
Here’s a closeup of the memory expansion:
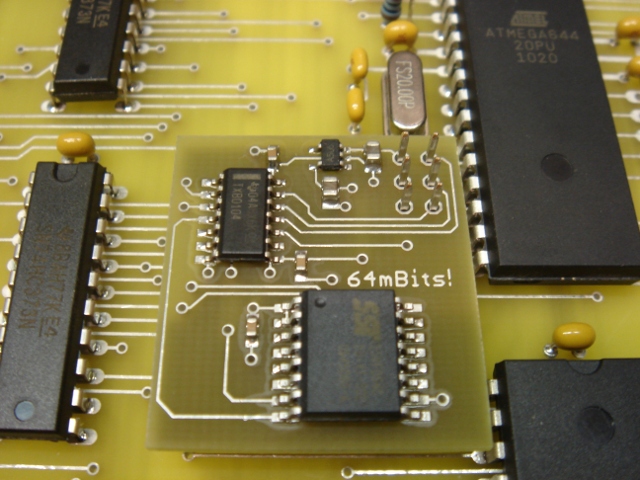
Onwards to power-up!
xo
TB
It’s built!
All the footprints work, nothing smacks anything else. Physically no failures. And it’s pretty!
Here’s a closeup of the memory expansion:
Onwards to power-up!
xo
TB
A very exciting day! It’s like this:
…and like that:
and like this and uh:
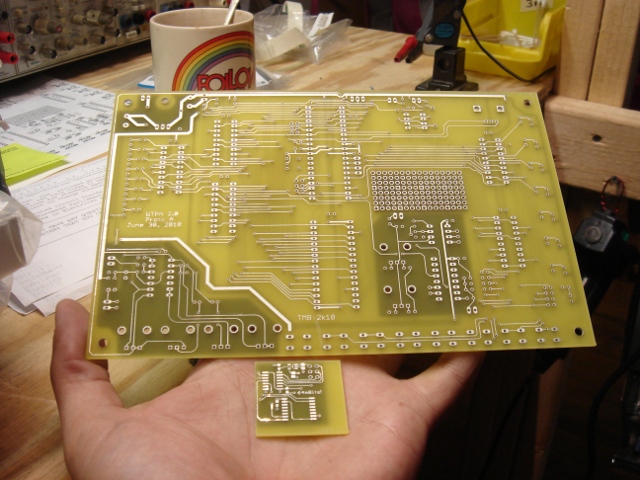
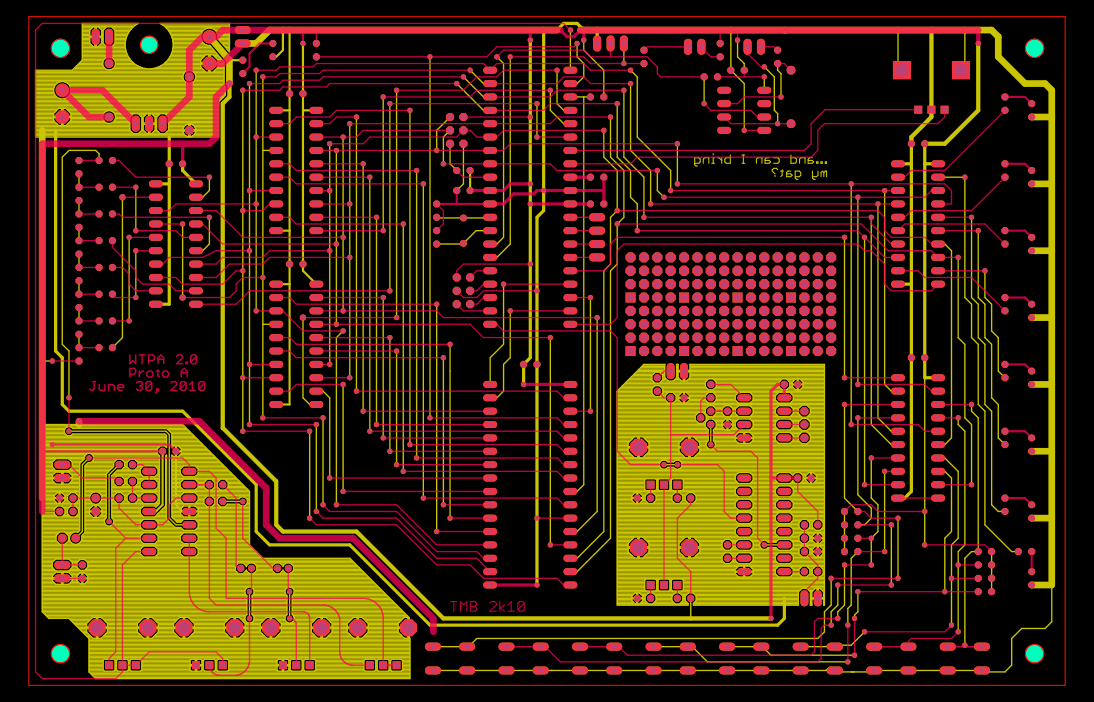
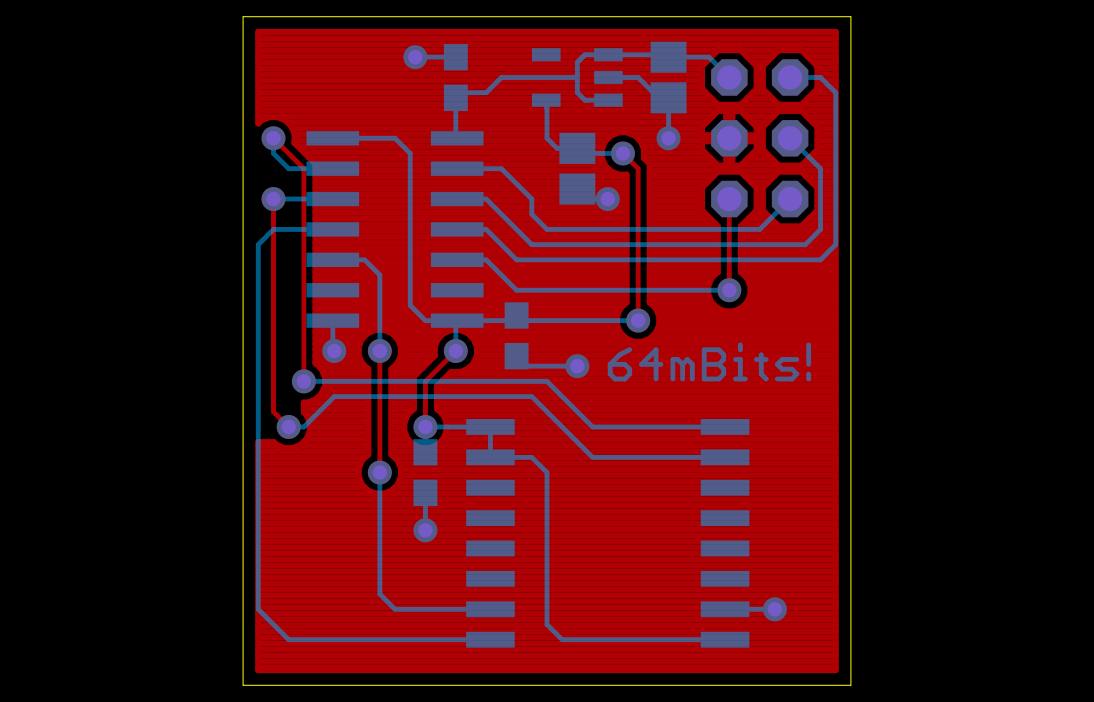
These are the gerbers for the new WTPA2 and its Flash daughterboard, and the REAL THINGS fresh off the jet from Advanced Circuits! The new kind-of-questionable-but-kind-of-awesome through-hole SRAM got here also:

So these all can go together today!!! There’s a ton of new firmware that I’m still working on to support new features, so we may not hear any crusty samples, but I’m hopeful we’ll get to see some lights blinking at least before sundown. It’s da future!
Stay tuned,
xo
TB
Yesterday Narrat1ve got a new (sort of) bench power supply in the form of an eBayed HP 6632b!
You can read what HP says about it but it basically kicks as much ass as I could really want or expect a single output PSU to kick. Until now I’d been using a couple of Tektronix PS503a units (which are pretty great, actually) and a Power Designs TW6050a (which is very heavy). However in the course of figuring out some VCO stuff I found myself really wanting to be able to step by small numbers of millivolts and trust with some certainty that what I was asking for was what I was getting (and the 6632b’s microamp measurement is handy for embedded stuff, too).
Anyhoo, the unit showed up all kinds of Dirt McGirt:

And had all kinds of goofy user settings in it. Ebay buyers of HP supplies take note:
Because I’m the kind of guy who reads the manual (and because a buddy of mine had just gotten one of these) I knew that it should have powered up in a certain state (namely, with the output disabled!) and it didn’t. One of the cool things about these supplies is that they talk RS-232 in many languages. One of the annoying things is that this one happened to be set to a language which sucked (COMPatibility, I guess an older GPIB compliant standard) and didn’t allow you to do many of the things that you can do with SCPI even from the front panel. After some head scratching and a LANG change this was resolved. The next problem was the fact that the front panel meter was a little off from what I was measuring at the output. “Lucky for me I have a fancy bench meter, and it’s easy to calibrate this thing,” I thought. WRONG.
Somebody had set the calibration password on this in times long gone by and there ain’t no changing it. I got the service manual and it turns out you can defeat password protection by flipping a DIP switch inside the chassis. This is when I took it apart and discovered the dirtball above.
After much swearing, compressed air, and windex, the inside of the chassis looked like this:
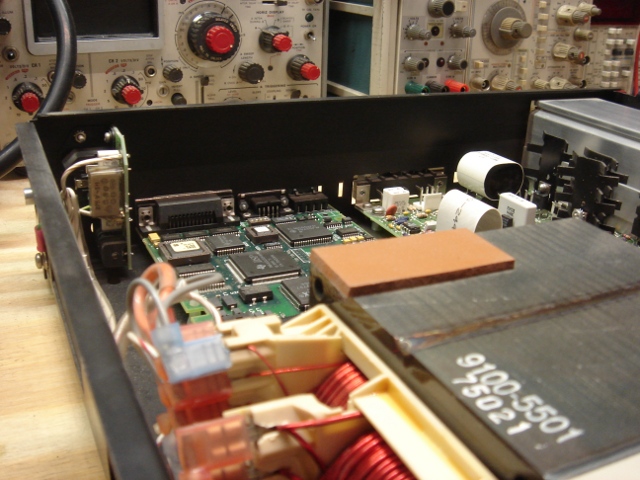
In addition to letting me get at the DIP switches, this also gave me a spiritual sense of wellness at having un-funked a nice piece of gear that somebody had really let go. It also made me less worried that there were secret vermin in my apartment that were taking refuge in my bench. It also made the fan run quieter.
In the course of doing this I also realized that the goobers who used this thing before had removed the terminal block jumpers from between the SENSE and OUTPUT screws. I replaced them. Who are these people? Were they so fancy they were using 4-wire? Who does that? Somehow I’m suspect.
Finally, I did the calibration. When it was done, the front panel meters were dead on, and the output voltage was within 0.2mV (worst case) of what my fancy meter says it should have been. Not perfect, but not bad for an eBay bench supply!
Finally, I installed my own “Front Panel Connectors” so I could use the thing without monkeying with the back:
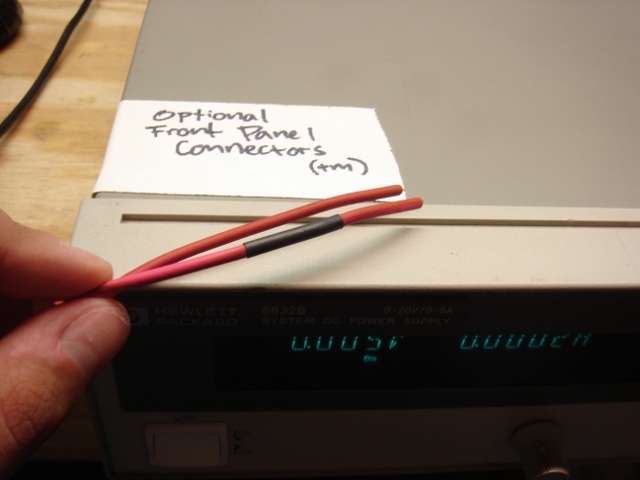
Baller status!
xo
TB
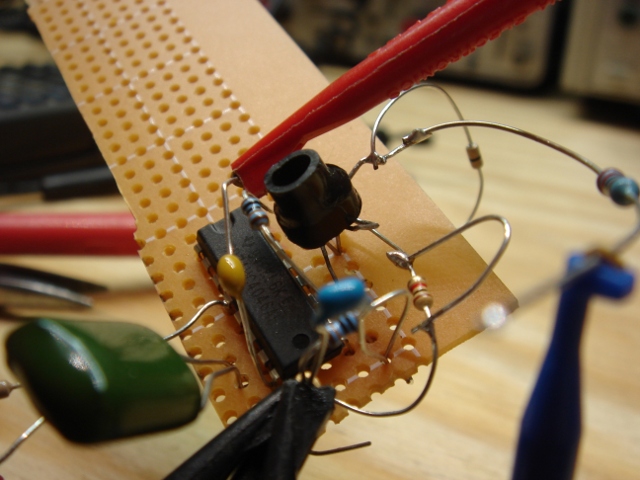
So this weekend marked the last screwing around (breadboarded, at least) with the VCO design for WTPA2. I knew that I could get the frequency range I needed out of a 4046 based VCO with a current sink in place of a frequency setting resistor but I was a little worried about temperature drift and very low frequency performance. Just for shits, I gave the circuit above a shot. It replaces the current sink with a standard two-transistor current mirror. The two devices above are crappily thermally coupled with a piece of heat shrink.
What I found with this is that temperature performance wasn’t too much better. It was still pretty easy to get this VCO to go crazy with the heat gun, although it was possible to get it to go crazy BI-DIRECTIONALLY based on the direction you were slathering on the sweat. Cute, but not useful.
One thing that WAS cool is that the current source compliance was great! The control voltage could get a lot higher than it could with the one-transistor sink before saturation, I assume because of the lack of emitter resistors in the circuit. Still, that was like a consolation prize.
So I caved and built this:
Here’s the schematic for it:
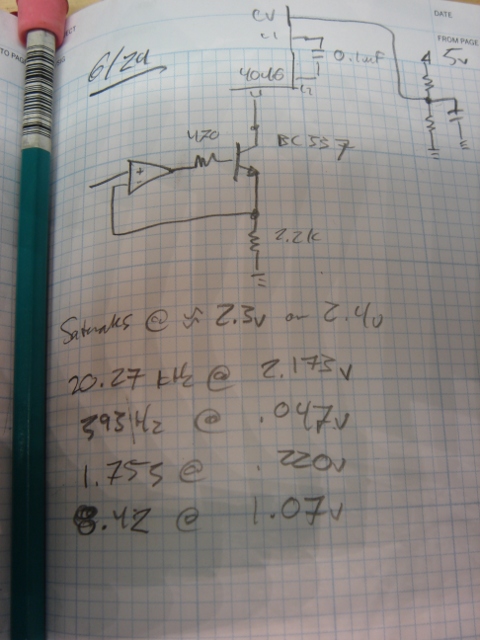
It’s what all the docs I saw suggested originally (a closed loop current sink where the op-amp compensated the temp drift of the transistor) and it totally works and does what it’s supposed to. The only annoying thing is that at VERY low currents the device is non-linear, but what are you gonna do. At a hundred Hz sampling rate all samples sound like farts anyway.
The CV has to be kept below about 2.2v to keep the transistor from saturating (the VCO goes nuts when this happens) but you can fix this with a divider on the input. The range with these components is about 0-20kHz with a CV from 0 to 2.1v or so.
Now I gotta figure out what to do with that other half of the 358. I sort of don’t want to pass it audio, because it’s a recipe for coupling noise into the circuit. We’ll see….
This week I’m working on the board layout for the first WTPA2 revision. I expect the next post here will be about that.
xo
TB

So I got back from Chicago on Monday, where I went to take care of this blighted piece of public art. “Remoc” is this big old green beast who I made with a sculptor buddy back in like 2005, at the behest of my old boss, for the UChicago Childrens’ Hospital. Theoretically he makes sick kids laugh. I’ve seen this. I know it happens sometimes. Usually when you pull his finger, as above. However it is hard not to see him as basically a monster whose job it is to complicate my life.
In some earlier posts I talk about some of the capacitive sensors I designed for him, to allow him to sense childrens’ touches. Well, they developed problems (spurious reads) and I had to head back to the midwest to have a look.
I knew his sensor circuits were pretty resolute, but I basically no-brainered his sensor code because I was too confident in my design. The day before I left to head back to the windy windy I re-wrote a bunch of his sensor handling code.
Mostly I changed how he crunches numbers. Sensor data ends up getting put into two different filters; one with a long time constant and one with a short one. His long term averages are generated by an IIR which divides by 8192, so it takes something like 73,000 readings to settle from 0 to 4096 (12-bit sensors). Sensors were updated in the main game loop, so the loop timing was “fast but indeterminite”. I’d have scoped it, if I had a scope and the hardware in the same place. In real life it took him five minutes or so to settle from any particularly messed up event (like unplugging a sensor).
The short term averages do the same thing over 32. I tried using an FIR (where you have an array and subtract an old member and add in a new one) for this but it ended up being more of a pain in the ass as I kept missing some stupid bug I was making where I wrote off the end of an array so I just made it an IIR since there were people watching and expecting results.
The two were then compared via percentage difference. I also changed the way his serial monitor worked to make it easier to see all this data change in realtime (I’ve gotten really into sending ANSI clear-screen escape sequences to xterm. It’s hood, but it works).
What I learned from this was two of his ten sensors (the copper tape parts, installed in his bowels a million years ago, and also set on fire once or twice by the sculptor) have shifted positions — I could see this by looking at the readings and moving my hand around. So there was no fixing this (correctly) without cutting a lot of fiberglass. I asked the hospital folks whether they would be OK with cutting his arm off for a little while and surprisingly they said no. Which was just fine with me. I did what I could with the data coming out but it wasn’t much. You may have to womp on his cast really hard to trigger it now, but it won’t read spuriously.
While sensor-sensor interference may be a little bit of a problem, I could also could tell that there were bigger EMI problems, generated by switching the LEDs and PWM audio. Those sensors are relatively insensitive to LF noise, but not so much to HF, which I’d change in future sensor designs. For the nonce I changed when the sensors were polled in the game code and disregarded reads which happened during electrically noisy events.
You know, regular electronics stuff:-)
I’d love a chance to do him all over again, but until then, I’m _almost_ happy with how he is.
Here’s some of the code I used.
The following updates his averages/filters:
static void UpdateTouchsensorAverages()
// Work averaging magic on sensor readings.
// Capacitance is indicated by low readings. When the readings increase it means a removed hand OR a temperature rise.
{
unsigned int
temp,
i;
for(i=0;i<NUM_SENSORS;i++)
{
temp=adcResults[i];
// Update long term reading
sensorLongTermAverages[i]-=(sensorLongTermAverages[i]/LONG_TERM_AVG_DIVISOR); // Remove a chunk of the average.
sensorLongTermAverages[i]+=temp; // Add in our new sample into average.
sensorShortTermAverages[i]-=(sensorShortTermAverages[i]/SHORT_TERM_AVG_ARRAY_SIZE);
sensorShortTermAverages[i]+=temp;
}
}
This next bit compares the two values and decides whether he is “touched”:
static unsigned int TouchsensorsToKeyStates()
// Take the touchsensor readings, look at thresholds, and make them into keypresses.
// Since there are no real keys in this application, this is straightforward.
// We will just pass this directly to keyStates.
{
unsigned int
i,
tempMask;
tempMask=0; // Zero out "keys".
for(i=0;i<NUM_SENSORS;i++) // Make keys that correspond to all sensors.
{
if((sensorShortTermAverages[i]*SHORT_TERM_MULTIPLIER)+((sensorLongTermAverages[i]*sensorThresholdPercentage[i])/100)<=sensorLongTermAverages[i]) // Scale up the short term reading, add it to a determined percentage of the long term. If the sum is less than the long term average, call it a touch.
{
// printf("TOUCH: %d\n",i);
tempMask|=(1<<i); // Mark this sensor as a pressed key.
}
}
return(tempMask);
}
and this last part spits out RS232 data when I tell it to so I can “see what he’s feeling” like a marriage counselor:
static void DisplayAdcValues(void)
// Monitors Adc Shizz. Prints out variables and touch info.
{
unsigned int
i;
unsigned char
inputChar;
if(CheckTimer(TIMER_1))
{
ResetTimer(TIMER_1);
SerialWriteByte(DEBUG_UART,'\e'); // ANSI clear screen. Old skool!
SerialWriteByte(DEBUG_UART,'[');
SerialWriteByte(DEBUG_UART,'2');
SerialWriteByte(DEBUG_UART,'J');
printf("x to Exit\n");
for(i=0;i<NUM_SENSORS;i++)
{
printf("S:#%d adc=%d L=%d S=%d DP= ",i,adcResults[i],sensorLongTermAverages[i],(sensorShortTermAverages[i]*SHORT_TERM_MULTIPLIER)); // Print the sensor number and its averages.
if(sensorLongTermAverages[i]>(sensorShortTermAverages[i]*SHORT_TERM_MULTIPLIER)) // FIR is less than the IIR (this is how it should be when touched)
{
printf("-");
printf("%d",((sensorLongTermAverages[i]-(sensorShortTermAverages[i]*SHORT_TERM_MULTIPLIER))*100)/sensorLongTermAverages[i]); // Print percent difference the short term is from the long
}
else // FIR is greater.
{
printf("+");
printf("%d",(((sensorShortTermAverages[i]*SHORT_TERM_MULTIPLIER)-sensorLongTermAverages[i])*100)/sensorLongTermAverages[i]); // Print percent difference the short term is from the long
}
if(keyState&(1<<i)) // Touched?
{
printf(" ***\n");
}
else
{
printf("\n");
}
}
printf("\n");
}
else if(SerialRxBytesWaiting(DEBUG_UART)) // Something in the buffer?
{
inputChar=SerialReadByte(DEBUG_UART); // Get it.
if(inputChar=='x')
{
printf("\nMonitor Done. Hope you learned something. Bye!\n");
SetGameState(RemocTerminal);
gameSubState=GSS_0;
}
}
}
This is all C code (duh) which is compiled with GCC for an M68k target.
In this case, as in so many when I am lost in the programming weeds, my buddy Todd Squires gave me tons of useful pointers.
It is also worth noting that a more positive analysis might paint Remoc as an excuse to spend a weekend in my old hometown drinking beer on the Metra tracks and eating the worlds finest tacos, which exist in Chicago, and which pretty much grow on trees.
xo
TMB